
1. Introduction
In the drone industry, battery life is the ultimate determining factor for flight time, mission duration and locations of ground bases. As a result, increasing battery life has been a key area of research in the industry. The report begins by assessing the suitability of two potential sources by defining the suitability criteria, conducting individual evaluations of each source, and comparing the two to determine which is the most appropriate. The report will further explore the existing solutions for increasing battery time. These solutions include drone swapping which involves replacing a depleted drone for a charged one, battery hot swapping, a process of swapping out depleted external batteries with fully charged ones and laser beaming for wireless charging of drones while airborne.
Furthermore, we explore the integration of artificial intelligence (AI) in the drone industry. Artificial intelligence is the simulation of human intelligence conducted by machines and systems through various methods. Some of these methods that are utilised in the drone industry are: genetic algorithms for identifying the most energy-efficient flight path, computation offloading using convolution neural networks to reduce battery usage, and fuzzy logic-based reinforcement learning for drone positioning and communication, as potential solutions to extend drone usage time.
After conducting the literature review, it is evident that there are two major limitations faced by drone operations: communication and battery life. The limitation of communication refers to the range and latency of communication between drones, ground base and external parties, while the limitation of battery life refers to the amount of time drones can stay airborne without the need to replace its battery. This report will dive into these areas through exploring alternative battery types, specifically lithium air, as they offer a highly efficient and lightweight battery solution that are more efficient and cost-effective than traditional lithium polymer batteries. Additionally, the report will expand on the development of a system that implements a fixed wing drone that conducts all the battery intensive tasks and communications that a small drone would typically handle. By doing so, this system effectively reduces communication delays and maximizes the usage time of small drones, resulting in a significant increase in the overall mission duration.
2. Critical evaluation:
To conduct an effective and critical evaluation of the two following articles, it is essential to define the following suitability criteria which the articles must meet. The following criteria are:
Relevance: the articles need to have a connection to the research problem. This could be in the form of related information, insights, analysis, diagrams and author perceptions that can enhance the understanding of the topic and support this report.
Reliability: it is vital that articles should be published from a reputable source while the authors should be from a respectable institution. This ensures that the articles are of high- quality and are truthful as they would have undergone extensive peer reviews while the authors have the knowledge and expertise to create high quality articles. This can be reflected by the number of citations the article has received by other researchers as it indicates its importance in the field.
Accuracy: any information provided in the articles should rely on data, analysis, experiments, and accurate citations to support its claim. By doing so they avoid any unsupported assumptions or claims as well as misinformation throughout the article.
Uncertainty: it is crucial that articles must not contain any information, claims, results, and other methods that is skewed in a way to benefit their topic or perspective. They must be transparent by acknowledging and addressing any uncertainty that arises as failure to do so will affect the validity of their findings.
Timeliness: articles should be published containing methods, events or developments in topics that is relevant and up to date to its time. Recent developments that are incorporated in the article needs to be investigated thoroughly to evaluate its reliability. Not only should the article be recent, but article timeline should also be taken into consideration to guarantee information is well researched and not hastily put together.
Completeness: for articles to be relevant to their topic and beneficial to other researchers, they should cover all essential information regarding the topic, provide in-depth analysis with no gaps in their research and experiments. Articles should also aim to compare any proposed techniques or solutions from relevant research of a variety of sources to current real-world implementation.
Article 1:
During the initial search for articles, (Parvaresh et al., 2022) stood out to as a significant article. Due to its well-constructed sections and well as extensive research from 136 articles, the article gave a clear and concise “tutorial on AI-powered 3D deployment of drone base stations, including their State of the art, applications and challenges”(Parvaresh et al., 2022), covering all essential information.
This article does not have a strong relevance to the research problem as they mainly focus on AI techniques to improve the deployment of UAV’s, they do however recognise that “UAVs consume excessive power for mobility support” and “advanced charging technologies should be utilized alongside energy efficient protocols”(Parvaresh et al., 2022). The article includes a table comparing its contributions to other articles, in which several articles were identified as a critical source for this research problem, making it quite relevant to the research problem.
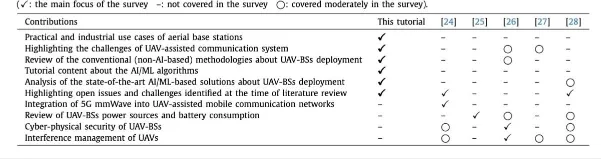
Figure 1: contribution of the topics covered in this article in comparison to its sources.(Parvaresh et al., 2022)
The author has recently contributed to two articles focusing on AI models for UAV base stations and have graduated from University of Ottawa, Canada, a respectable institution recognised for its research and academic programs. The article was published by Elsevier, a well-known academic publisher, reinforcing this article’s reliability. All information and solutions identified from accurate sources have been accompanied by a relevant diagram or mathematical formula to reinforce readers understanding, demonstrating the articles accuracy.
The article did not appear to contain any uncertainty, however no discussion regarding the real-world examples of AI implemented solutions have been identified and no comparison of the solutions to the current implementations was provided. The article was submitted to the publisher at the end of 2021 and in April 2022, it was revised before being published in the following month which indicates that the authors have taken their time to consider any risk or errors. It is also one of the most recent articles regarding its research problem, containing methods and insights that are up to date. Overall, (Parvaresh et al., 2022) provides a clear and extensive view on the solutions and challenges In utilising AI for deploying UAV’s as a base station.
Article 2:
The second article provides fundamental information regarding the research problem, as it addresses “UAV as mobile infrastructure, addressing battery life”(Galkin et al., 2019). It has been obtained from the first article’s citations and is quite relevant, if not the most relevant article to the research problem. It provides clear-cut understanding of the problem and compares the suggested solutions. For every solution there is a diagram that accompanies it to enhance the readers understanding.
Figure 2 Proposed UAV battery management 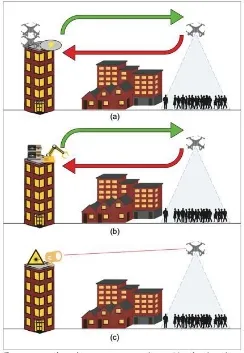 solutions(Galkin et al., 2019):
solutions(Galkin et al., 2019):
-
cycling through multiple UAVs to cover the mission location
-
hot swapping batteries of a single UAV covering a mission location.
-
using lasers to wirelessly power a UAV.
The article addresses all essential aspects of its problem. Beginning from an introduction of the challenges with UAV and AI algorithms from proposed articles to tackle them, transitioning to an overview of the “type of UAVs currently available on the civilian
market”(Galkin et al., 2019) as well as their characteristics. Additionally, it identifies possible solutions and comparing their results, discusses further on battery improvements and finally a conclusion and discussion.
The article is reliable as it is published by IEEE, a well-established publisher recognised for being the largest organisation dedicated to advancing technology. The author Boris Galkin is also reliable as he has 18 publications with 125 citations for this article, indicating its significance in its field. He has graduated with a Ph.D. at connect trinity college and has been publishing since 2014, which suggests he has a vast amount of knowledge and expertise, and the article is well researched.
All information presented in the articles appears to be accurate, containing citations for its claims and graphs for comparing proposed solutions and simulated operating time for different battery types. However, for the graphs that compare the proposed solutions, there doesn’t appear to be a source to verify their claims, which could introduce a level of uncertainty.
With the article being published in 2019, it is quite relevant, containing solutions that are still applicable and effective. The article touches on the current “improvement of battery energy density can be approximated as a steady 3 percent performance increase per year”and uses different sources to compare battery types, proving to be a valuable source for its time and after its publication.
Overall, the second article is clearly more relevant as it contains solutions and simulations that are on par with the research problem. It is also more reliable with considerably more citations and author expertise in comparison to the first article. The first article however contains more sources, which supports its claims where supported formulas and diagrams are provided where applicable. It is also a quite recently published article than the second, containing newer developments and more up to date topics. It is also more effective in comprehending its research problem, providing in-depth analysis and extensive comparisons to other sources of similar solutions. Overall, despite the strengths of the first article, the second article is more suitable and a valuable source for this research project.
3. Literature review
Existing solutions to increase battery time.
drone swapping:
Drone swapping is a fundamental approach for overcoming limited battery life in drones. (Galkin et al., 2019)This involves returning the drone back to a ground base or charging station when its battery is low and swapping it with another fully charged drone to continue the mission while the depleted drone recharges. To ensure that the operation is conducted efficiently, it is essential to have a charged drone in transit while the depleted drone returns to charge. Although this solution appears to be effective, it can be rather expensive due to the need for multiple drones on standby, which can incur significant acquisition, maintenance, and storage costs.
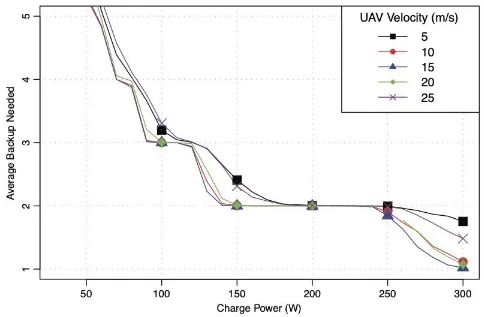
Figure 3: Number of drones required as a function of drone speed and charging power.(Galkin et al., 2019)
The number of drones required on standby is determined by “UAV “downtime,” that is, the length of time the UAV will need to travel back to its charging station, recharge, and return to the hotspot.”(Galkin et al., 2019). Another key factor to consider is the the speed at which the drones can be recharged. This article illustrates this by graphing the drone speed and charging power to indicate the number of drones required to maintain a continuous, uninterrupted operation. Drone swapping can be an effective method for certain applications such as inspections, however it may not be ideal for other applications such as search and rescue missions where(Alsamhi et al., 2022) utilises drones in conjunction with AI to locate injured and missing people, where constant monitoring is essential. Therefore, utilising other solutions may be more beneficial for this application.
Battery hot swapping
This method is popular in commercial and professional drones where it aims to extend battery life and minimise downtime. This is achieved by incorporating external battery packs to drones where they power the internal battery and are “replaced without the UAV being powered off”(Galkin et al., 2019). This reduces the number of procedures required as a single drone can be deployed without causing any interruptions to software operations or procedures that may be running in the background.
Figure 4: downtime of drone under battery hot swapping, as a function of drone velocity and charging station density. (Galkin et al., 2019)
While this method may seem ideal, a crucial factor to consider is the time it takes to return to ground base and have its batteries replaced before continuing the operation. This could result in a halt in the operations. (Galkin et al., 2019) demonstrates the effect of this on drones as the “total downtime will last less than three minutes for the majority of the UAV velocities.” However, when the trip time to and from the operation are factored, this method may not be feasible for certain time sensitive applications such as forest fire detection outlined in (Kinaneva et al., 2019), which requires constant drone surveillance for the identification of fire or smoke by the onboard AI.Overall, this method significantly reduces the overall cost as fewer drones and batteries are used to achieve the same level of uptime as drone swapping.
Laser beaming
Laser beaming is the process of utilising a mobile source of energy to produce a “concentrated and streamlined beam of light at a certain frequency and of a particular wavelength”(Lu et al., 2018) to transmit energy to photovoltaic cells mounted on a drone. This has only recently been explored for drone applications as a potential solution for extending flight time and long-range operations. Although this technology is “frequently used in military surveillance and intelligence missions”,(Lu et al., 2018) highlights a promising experiment conducted in Western Australia where a “quadrotor UAV equipped with a modified solar cell array capable of receiving energy from an infrared laser via a laser beaming technology”. With the drone weighing 1kg, it was able to remain airborne for over 12 hours, demonstrating its potential in the drone commercial industry.
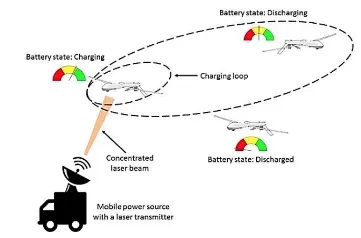
Figure 5 Laser beaming procedure for drone charging (Lu et al., 2018)
One significant limitation of this technology is the range of the laser beam. The drone must be within a certain proximity for the photovoltaic cells to effectively intercept the laser and begin the charging process. (Galkin et al., 2019) explores this further by simulating the probability of a drone being successfully charged over a certain height and laser density. The results proved that a drone altitude of 120 metres was most efficient to effectively reach the photovoltaic cells. However, if this technology were to be implemented, drone altitude restrictions could pose a significant challenge to its accuracy as the legal height limit is at 120 meters and could affect its implementation.
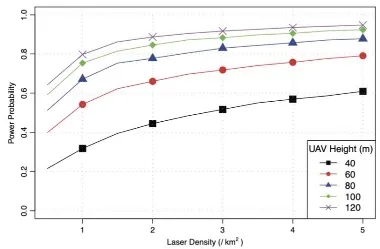
Figure 6: Probability that a drone can be successfully charged, as a function of laser density and drone height (note: laser height is at 30 m above ground)
AI integrated solutions to increase battery time. With the rapid developments of AI and the drone industry seeking longer flight times and greater efficiency, numerous articles on incorporating AI into drones have been researched and published, with promising developments of machine learning solutions to extend the battery life of drones.
Genetic algorithms for efficient drone planning
Genetic algorithms (GA) are an optimisation algorithm that simulates the process of natural selection. Although (Dominguez et al., 2017) have utilized this approach for trajectory planning, it can also be implemented to develop energy-efficient path planning solutions by determining the best route that minimizes battery consumption.
The process begins by generating a randomized population or generation of flight paths, with a controlled range of parameters such as altitude, speed, and heading are defined. Each generated flight path is evaluated through a fitness test, where its suitability is measured based on how well it meets the criteria of minimizing battery usage while accomplishing the desired task. Only the fittest solutions are selected, and crossover and mutation process are implemented to generate a new set of flight paths. Crossover is the process of randomly selecting characteristics from parent solutions to generate one or more offspring, while mutation is the process of randomly applying small changes to the parameters of the offspring to prevent the model from converging on a suboptimal solution.
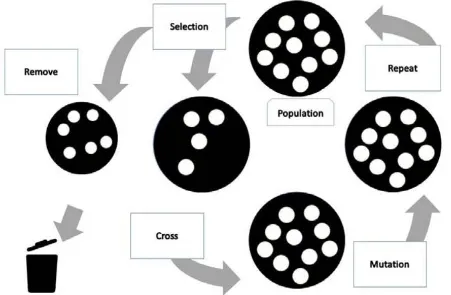
Figure 7: an abstract model of genetic algorithms (Dominguez et al., 2017)
This cycle is repeated until the algorithm satisfies the stopping criteria, such as the number of generations or the desired fitness threshold. A penalty-based approach can also be incorporated to assign negative points to the fitness test in order to train the model to avoid obstacles and enhance obstacle avoidance. This model “improves the planning of the UAV’s fleet trajectory by 35%”(Dominguez et al., 2017). With sufficient training, similar improvements in drone battery life can also be achieved.
Offloading AI computation using CNN With the advancements in AI and computer vision, AI-powered drones are becoming increasingly popular. However, embedding AI directly onto the drone can significantly reduce operating time, due to power consumption associated with AI computations. (Kim et al., 2021) tackles this issue by proposing a Realtime offloading where “An AI-powered drone can process inferences using CNNs locally or offload some of the inference jobs to servers”.
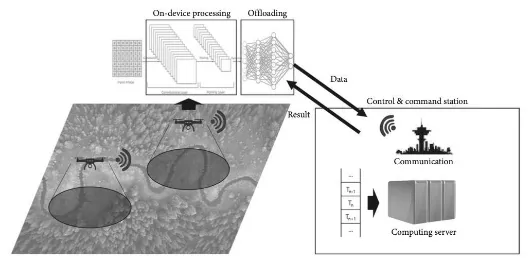
Figure 8: overview of proposed framework (Kim et al., 2021)
It utilises convolution neural networks (CNN’s), a machine learning model that specialises in object detection and image classification through neural layers that extract features from input images and classifies objects within them. The objective of the proposed framework is for a drone to initialise the classification up to an ‘x’ layer in the CNN before delegating the remaining layers to a GPU server. This ‘x’ layer is calculated with respect to meeting constraints such as battery life, inference execution time and transmission time.
With countless simulations including various deadlines, this method consumed less energy than performing the entire process on the drone. One potential drawback of this method is the possibility of latency issues. This is due to data being transmitted to the server for processing and the results are then sent back to the drone, which may not be ideal for real world applications such as fire detection.
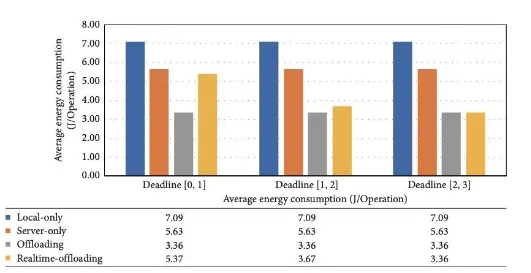
Figure 9: average energy consumption across various methods (Kim et al., 2021)
Fuzzy RL for Efficient Drone Positioning and Communication Although we have examined solutions that assume an unobstructed visual line of sight (VLOS) between the drones and the base station, it is common to encounter obstacles that obstruct their communication in various situations. (Khelifi et al., 2018) proposed a framework that utilizes fuzzy logic-based reinforcement learning that uses Received Signal Strength Indicator (RSSI) to determine the location of drones based on their signal strength in GPS denied locations. This involves having drones relay a signal to each other in order to calculate their distance from each other using their RSSI values and edge weights, which improves the accuracy of drone localization.

Figure 10: Example of an emergency communication network based on a fuzzy logic RL framework. (Khelifi et al., 2018)
Once all drones are identified, cluster heads are then chosen based on the drones that have the highest battery life, and data is transferred from the cluster heads to ground station. To optimize the network for maximum efficiency, reinforcement learning will be used to identify the most efficient path with the highest battery life cluster heads. This leads to reduced energy consumption and increased drone battery life. Incorporating dynamic identification of cluster heads based on drones with the highest battery life could increase the overall duration of the operation.
One major limitation to this method is the algorithm becoming outdated. As the environment and circumstances changes, the trained model may not be compatible with the current environment and would require retraining. This can be time consuming and resource intensive, particularly in complex and dynamic environments. Therefore, periodic training will be required. Another significant limitation is the effectiveness of this method altogether. Through extensive simulations,(Khelifi et al., 2018) managed to achieve a 8% efficiency, this increase may not be considered significant enough for real world implementation. Overall, by conducting further research into integrating a fuzzy based reinforcement learning into a drone network operation, it is possible to significantly enhance the efficiency and durability of drone missions in GPS challenged locations.
Research gaps
After conducting the literature review, it is evident that there are two major limitations faced by drone operations: communication and battery life. The limitation of communication refers to the range and latency of communication between drones, ground base and external party, while the limitation of battery life refers to the amount of time the drone can stay airborne without the need to replace its battery.
To address this gap in research, a drone configuration similar to the one proposed by (Kinaneva et al., 2019) could be implemented. This configuration involves using a fixed- wing drone to detect fires, and then deploying a quadcopter equipped with an AI model to analyse and classify fires and smoke. However, in the current configuration, the fixed-wing drone remains idle while the quadcopter gathers data and computes all the data with the onboard AI model, resulting in inefficient use of battery life and much shorter drone usage time. To implement this configuration efficiently, a fixed wing drone such as the FVR-90 could be used where it has a battery life between 12-18 hours, a communication range of 1500kms and a maximum payload of 10 kg, making it the ideal drone for the situation. It also eliminates the need for additional communication hardware, resulting in longer battery life. The FVR-90 would house all the necessary computational components, including the embedded AI model, and perform any other battery-intensive tasks, making efficient use of the smaller cheaper drones.

Figure 11: Overview of proposed system (Kinaneva et al., 2019)
To achieve this, the fixed wing drone would initially detect a fire and dispatch a quadcopter to confirm the existence of the fire, following the model proposed by (Kinaneva et al., 2019). However, just before arriving at the fire location, the quadcopter would establish a connection with the fixed wing drone and transmit all the data it will gather from its sensors and cameras for computation, enabling further flight time and improved efficiency. This model could be further expanded by allowing the fixed wing drone to communicate directly with the helicopter firefighting unit, providing precise information on the fire location, which would facilitate a more efficient approach to extinguishing the fire. This would eliminate communication delays and automate the entire process. This method can be adapted to a variety of drone operations where they demand extended flight times and computational capabilities. It could also immensely contribute to the drone industry by proposing a new and efficient way of carrying out drone operations efficiently and cost-effectively.***
One area that the articles do not cover is the exploration of alternative battery technologies. The most common battery that are widely used not only in commercial drones but also in other devices are Li-Po (Lithium Polymer). They are known for their high energy density and their ability to be manufactured in various shapes and sizes, making them the ideal use for drones. (Nozawa, 2017) estimates its energy density will increase about 20 to 30% by 2025 making them even more suitable for use in drones.
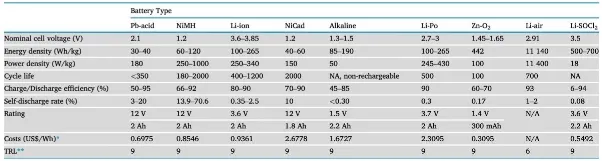
Figure 12: Comparison of energy sources (Townsend et al., 2020)
While (Galkin et al., 2019) discusses the 3 types of batteries that are currently being researched which promises an improvement in energy density,lithium-air batteries stand out among the three that has a significantly higher density than traditional LiPo. A comprehensive review of energy sources conducted by (Townsend et al., 2020) also confirms that Li-air batteries have the potential to contain the highest energy density among the different types of batteries. This can result in significantly longer flight times, more than four times the flight time of a typical drone using LiPo battery fig.13.
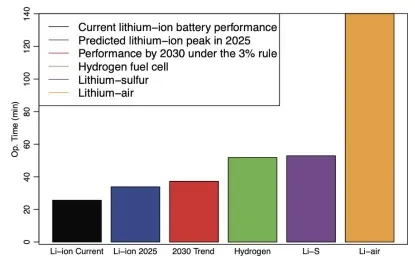
Figure 13: flight performance of battery sources (Galkin et al., 2019)
Rather than storing the oxygen in the cathode, Li-air uses porous cathode to collect oxygen from its environment, which results in an increased drone time and heavier payload. However, Li-air batteries are still in development and face significant technical challenges, including finding stable electrolytes that can operate in the presence of air, stability of the battery’s cathode during the charging and discharging and preventing the formation of unwanted by products such as crystals that can reduce the battery’s lifespan. While Li-air is not currently feasible, with further exploration and research of alternative battery technologies, Li-air batteries has the potential to increase payload capacity due to its lightweight design and significantly extend drone usage time.
4. Conclusion/Discussion
This report outlines the existing and AI proposed techniques to extend the flight time of drones. Drone swapping involves swapping the depleted drone with a fully charged one to continue the mission while the depleted one recharges. While this technique can be costly due to the need for several drones on standby, it remains viable to small scale operations where deploying other methods may not be feasible. Battery hot swapping is a popular method used in commercial and professional drones to extend battery life and minimise downtime. This method involves replacing the drone’s external batteries without the need to power off the drone, reducing the number of procedures required. This method may not be suitable for time sensitive operations such as search, and rescue missions and other methods must be explored. While laser beaming is primarily used in military applications, recent experiments have demonstrated its potential for commercial use. Through wireless transmission of energy to a drone, it has the potential to remain airborne for extended periods of time, significantly benefiting the drone industry. However, the limited range, power, and mobility of the laser beam as well as altitude restrictions pose challenges in its widespread implementation.
Utilising AI, genetic algorithms are a promising approach in energy-efficient path planning for drones. By simulating natural selection, GA’s can optimize the flight path of a drone to optimise battery consumption while accomplishing the desired task. With sufficient training, genetic algorithms can achieve significant improvements in drone battery life, making them a valuable tool for small-scale operations where deploying other methods may not be feasible. Adopting CNNs for offloading AI computation can significantly reduce the power consumption associated to drones, which in turn can increase their operating time. This allows for AI imbedded drones to partially compute the process and offload the rest to a dedicated server, which will reduce the strain on the battery extend flight time. However, latency problems that occur from transmitting the data from the drone to the server makes this approach unsuitable for time sensitive applications. The utilization of a fuzzy logic reinforcement learning framework for drone positioning and communication in GPS denied locations holds promise for significantly improving the efficiency and durability of drone operations. While this framework has demonstrated improved accuracy in drone localization and the potential to optimize battery life, limitations such as algorithmic obsolescence and limited efficiency gains have hindered its deployability.
From the research conducted in this report, it is evident that further exploration into battery life and communication is needed. Future research needs to mainly focus on implementing a system using a fixed-wing drone that has a significantly long battery life and an extended communication range, enabling it to effectively handle AI computation and other battery- consuming tasks from the inferior cheap drones. This does not only remove the need for a ground station to serve as a link between the drones and any other external parties, it also reduces communication delays and increases mission efficiency. Additionally, it extends the battery life of the inferior drones allowing for longer mission duration. By conducting further research, this system could revolutionize the way drone operations are carried out. Another proposed area of focus is exploring alternative battery types, specifically lithium-air batteries. This is due to their highly efficient and lightweight energy solution compared to traditional lithium polymer batteries. While this could greatly benefit drone operations, it is still in development and through further research, the implementation of lithium-air batteries could be accelerated resulting in a more efficient and cost-effective alternative to LiPo batteries.
5. Reference List
Alsamhi, S. H., Shvetsov, A. V., Kumar, S., Shvetsova, S. V., Alhartomi, M. A., Hawbani, A.,
Rajput, N. S., Srivastava, S., Saif, A., & Nyangaresi, V. O. (2022). UAV computing- assisted search and rescue mission framework for disaster and harsh environment mitigation. Drones, 6(7), 154.
Bajaj, A. (July 6, 2022 ). The Power of Artificial Intelligence in Drones
Dominguez, M. H., Nesmachnow, S., & Hernández-Vega, J.-I. (2017). Planning a drone fleet
using artificial intelligence for search and rescue missions. 2017 IEEE XXIV International Conference on Electronics, Electrical Engineering and Computing (INTERCON),
Galkin, B., Kibilda, J., & DaSilva, L. A. (2019). UAVs as mobile infrastructure: Addressing
battery lifetime. IEEE Communications Magazine, 57(6), 132-137.
Khelifi, F., Bradai, A., Singh, K., & Atri, M. (2018). Localization and energy-efficient data
routing for unmanned aerial vehicles: Fuzzy-logic-based approach. IEEE Communications Magazine, 56(4), 129-133.
Kim, B., Jung, J., Min, H., & Heo, J. (2021). Energy efficient and real-time remote sensing in
AI-powered drone. Mobile Information Systems, 2021, 1-8.
Kinaneva, D., Hristov, G., Raychev, J., & Zahariev, P. (2019). Early forest fire detection using
drones and artificial intelligence. 2019 42nd International Convention on Information and Communication Technology, Electronics and Microelectronics (MIPRO),
Lu, M., Bagheri, M., James, A. P., & Phung, T. (2018). Wireless charging techniques for UAVs:
A review, reconceptualization, and extension. IEEE Access, 6, 29865-29884.
Nozawa, T. (2017). New Battery Technologies Still Years Away. In Nikkei Asian Review. Parvaresh, N., Kulhandjian, M., Kulhandjian, H., D’Amours, C., & Kantarci, B. (2022). A
tutorial on AI-powered 3D deployment of drone base stations: State of the art, applications and challenges. Vehicular Communications, 100474.
Townsend, A., Jiya, I. N., Martinson, C., Bessarabov, D., & Gouws, R. (2020). A comprehensive
review of energy sources for unmanned aerial vehicles, their shortfalls and opportunities for improvements. Heliyon, 6(11), e05285.
